VORTEILE
- Kraftumlenkung um 90°
- zweites Wellenende
- Selbsthemmung bei hohen Übersetzungen
EIGENSCHAFTEN
- hohe Laufruhe
- wartungsfrei
OPTIONEN
- Low-Noise-Ausführungen
- Hohlwelle
- Sonderwellen
- Sonderschmierungen
| Allgemeine Angaben | |
| Gehäuse | Zink-Druckguss |
| Schnecke | Stahl einsatzgehärtet, Flanken geschl. |
| Schneckenrad | Sonderbronze CuZn37Mn3Al2Si (optional Kunststoff) |
| Schutzart | IP 40 (optional IP 55) |
| Lagerung | Kugellager |
| Schmierung | Lebensdauerfettung |
| Einbaulagen | beliebig |
| RoHS, WEEE, REACH | ✓ |
| Grenzdaten | |
| Umgebungstemperaturen | – 25° C #— +50° C |
| max. Radial-/Axiallast | |
| Typ S | 150 N / 100 N |
SYNCHRONMOTOREN MIT GETRIEBE S
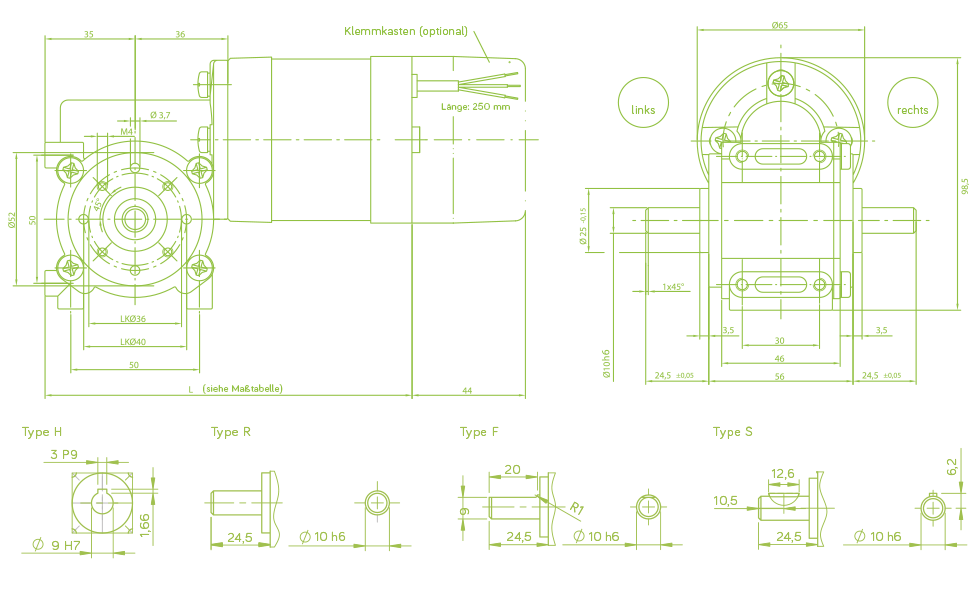
| Litzenausführung | Klemmkastenausführung | |||
|---|---|---|---|---|
| Getriebemotor | Länge in mm | Gewicht in kg | Länge in mm | Gewicht in kg |
| RO … 34 / 36 | 133 | 1,45 | 177 | 1,55 |
| RO … 44 / 46 | 145 | 1,65 | 189 | 1,75 |
| RO … 64 / 66 | 163 | 1,90 | 207 | 2,00 |
| RO … 84 / 86 | 188 | 2,35 | 232 | 2,45 |
ROMOTION MIT GETRIEBE S
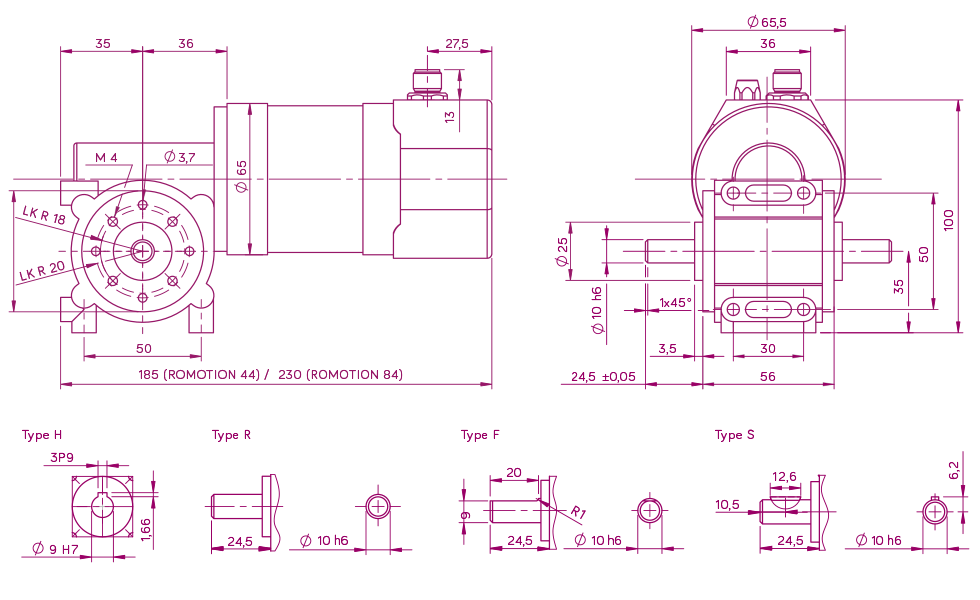
| Länge in mm | Gewicht in kg | |
|---|---|---|
| ROMOTION 44 | 184 | 2,1 |
| ROMOTION 84 | 228 | 2,8 |





Schneckengetriebe von Ruhrgetriebe erweitern den Rotek Baukasten.

Rosync Drehstrommotoren sind in Stern- oder Dreieckschaltung lieferbar.

Schneckengetriebe bilden effiziente Kombination mit Rosync Motoren.