HOHE LAUFRUHE – WARTUNGSFREIE TECHNIK
| Angaben | Werte |
|---|---|
|
MAX. DREHMOMENT |
5 – 12 Nm |
|
ÜBERSETZUNGEN I |
2,5:1 – 100:1 |
|
ACHSABSTAND |
31 mm |
|
FÜR MOTOREN BIS |
50 W (opt. 100 W) |
5
—
12
NM
2,5:1
—
100:1
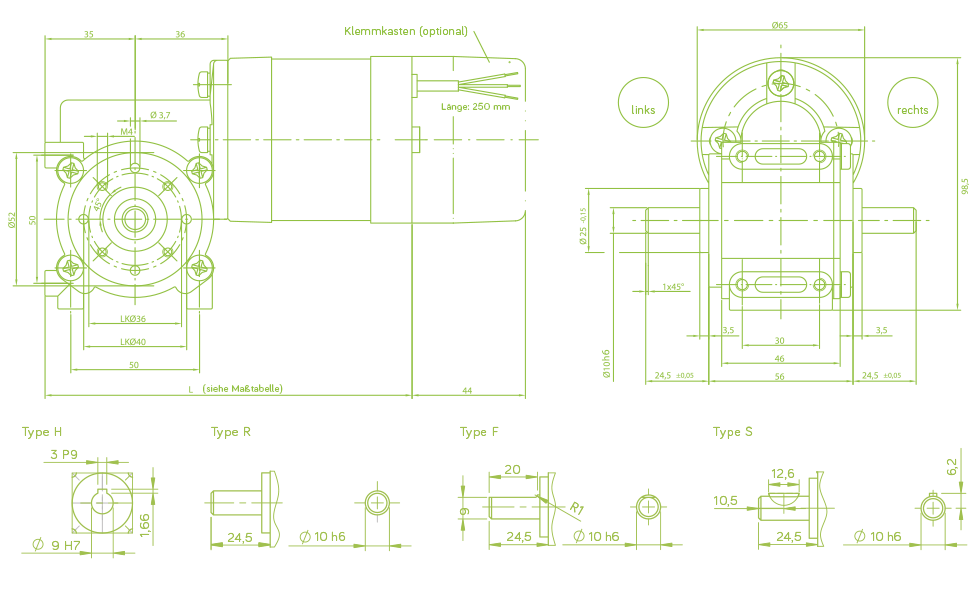
Schneckengetriebe
Schneckengetriebe bauen kompakt
ROTEK-Motoren mit Schneckengetriebe kommen überall dort zum Einsatz, wo aus Platzgründen eine Kraftumlenkung um 90° oder ein zweites Wellenende benötigt wird. Die Schneckenräder aus Bronze gewährleisten lange Standzeiten bei hohen Belastungen.
Die Getriebe sind für den Einsatz in geräuschkritischen Bereichen, wie der Medizin- oder Labortechnik, auch mit Schneckenrädern aus Hartgewebe lieferbar. Optional sind sie mit Hohlwelle erhältlich.
Informationen
VORTEILE
- Kraftumlenkung um 90°
- zweites Wellenende
- Selbsthemmung bei hohen Übersetzungen
Eigenschaften
- hohe Laufruhe
- wartungsfrei
OPTIONEN
- Low-Noise-Ausführungen
- Hohlwelle
- Sonderwellen
- Sonderschmierungen
| Allgemeine Angaben | |
| Gehäuse | Zink-Druckguss |
| Schnecke | Stahl einsatzgehärtet, Flanken geschl. |
| Schneckenrad | Sonderbronze CuZn37Mn3Al2Si (optional Kunststoff) |
| Schutzart | IP 40 (optional IP 55) |
| Lagerung | Kugellager |
| Schmierung | Lebensdauerfettung |
| Einbaulagen | beliebig |
| RoHS, WEEE, REACH | ✓ |
| Grenzdaten | |
| Umgebungstemperaturen | - 25° C #— +50° C |
| max. Radial-/Axiallast | |
| Typ S | 150 N / 100 N |
SYNCHRONMOTOREN MIT GETRIEBE S
| Litzenausführung | Klemmkastenausführung | |||
|---|---|---|---|---|
| Getriebemotor | Länge in mm | Gewicht in kg | Länge in mm | Gewicht in kg |
| RO ... 34 / 36 | 133 | 1,45 | 177 | 1,55 |
| RO ... 44 / 46 | 145 | 1,65 | 189 | 1,75 |
| RO ... 64 / 66 | 163 | 1,90 | 207 | 2,00 |
| RO ... 84 / 86 | 188 | 2,35 | 232 | 2,45 |
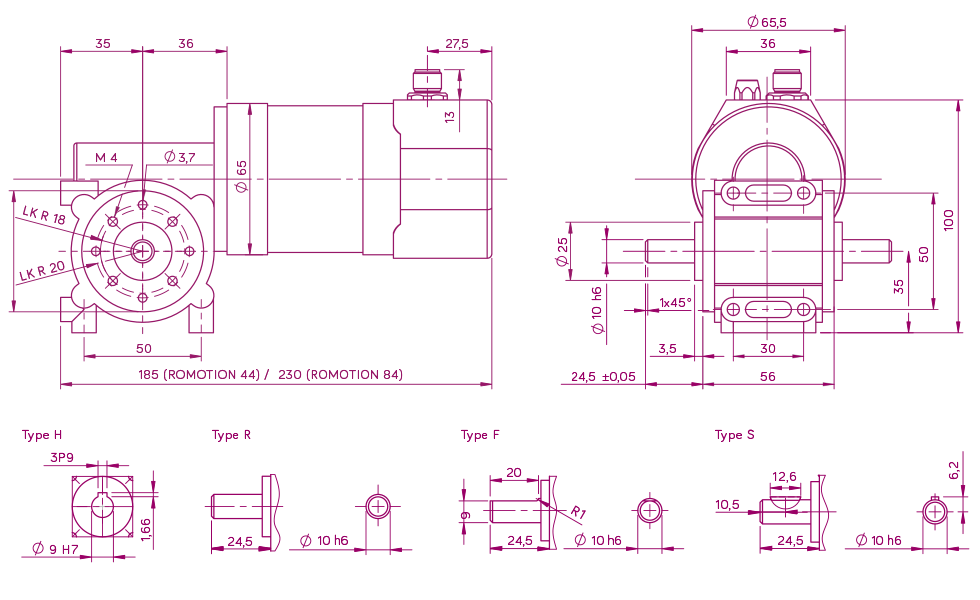
ROMOTION MIT GETRIEBE S
| Länge in mm | Gewicht in kg | |
|---|---|---|
| ROMOTION 44 | 184 | 2,1 |
| ROMOTION 84 | 228 | 2,8 |
SYNCHRONMOTOR ROBASE 6-POLIG MIT SCHNECKENGETRIEBE S
| Übersetzung | Typ S | Wirkungsgrad | Max. Drehmoment | Drehzahl | Drehmoment der Motortypen | ||||
|---|---|---|---|---|---|---|---|---|---|
| i | Vollwelle | Hohlwelle | η % | Nm | 1/min | 36 | 46 | 86 | 66 |
| Nm | Nm | Nm | Nm | ||||||
| Schneckengetriebe-Motor (6-polig) | |||||||||
| 2,5 | ✓ | - | 83 % | 5,3 | 400 | 0,16 | 0,23 | 0,31 | 0,44 |
| 5 | ✓ | - | 79 % | 11,0 | 200 | 0,30 | 0,43 | 0,59 | 0,83 |
| 7 | ✓ | ✓ | 75 % | 12,0 | 143 | 0,39 | 0,58 | 0,79 | 1,10 |
| 10 | ✓ | - | 70 % | 11,0 | 100 | 0,53 | 0,77 | 1,05 | 1,47 |
| 15 | ✓ | ✓ | 66 % | 13,0 | 67 | 0,74 | 1,09 | 1,49 | 2,08 |
| 20 | ✓ | ✓ | 61 % | 12,0 | 50 | 0,92 | 1,34 | 1,83 | 2,56 |
| 30 | ✓ | ✓ | 49 % | 12,0 | 33 | 1,10 | 1,62 | 2,21 | 3,09 |
| 50 | ✓ | - | 37 % | 11,0 | 20 | 1,39 | 2,04 | 2,78 | 3,89 |
| 55 | - | ✓ | 41 % | 13,0 | 18 | 1,69 | 2,48 | 3,38 | 4,74 |
| 75 | ✓ | - | 28 % | 8,8 | 13 | 1,58 | 2,31 | 3,15 | 4,41 |
| 100 | ✓ | - | 30 % | 8,9 | 10 | 2,25 | 3,30 | 4,50 | 6,30 |
| 167 | ✓ | ✓ | 23 % | 7 | 6 | 2,88 | 4,26 | 5,75 | 8,05 |
SYNCHRONMOTOR ROBASE 4-POLIG MIT SCHNECKENGETRIEBE S
| Übersetzung | Typ S | Wirkungsgrad | Max. Drehmoment | Drehzahl | Drehmoment der Motortypen | ||||
|---|---|---|---|---|---|---|---|---|---|
| i | Vollwelle | Hohlwelle | η % | Nm | 1/min | 36 | 46 | 86 | 66 |
| Nm | Nm | Nm | Nm | ||||||
| Schneckengetriebe-Motor (4polig) | |||||||||
| 2,5 | ✓ | - | 83 % | 5,3 | 600 | 0,12 | 0,19 | 0,25 | 0,37 |
| 5 | ✓ | - | 79 % | 11,0 | 300 | 0,24 | 0,36 | 0,47 | 0,71 |
| 7 | ✓ | ✓ | 75 % | 12,0 | 214 | 0,32 | 0,47 | 0,63 | 0,95 |
| 10 | ✓ | - | 70 % | 11,0 | 150 | 0,42 | 0,63 | 0,84 | 1,26 |
| 15 | ✓ | ✓ | 66 % | 13,0 | 100 | 0,59 | 0,89 | 1,19 | 1,78 |
| 20 | ✓ | ✓ | 61 % | 12,0 | 75 | 0,73 | 1,10 | 1,46 | 2,20 |
| 30 | ✓ | ✓ | 49 % | 12,0 | 50 | 0,88 | 1,32 | 1,76 | 2,65 |
| 50 | ✓ | - | 37 % | 11,0 | 30 | 1,11 | 1,67 | 2,22 | 3,33 |
| 55 | - | ✓ | 41 % | 13,0 | 27 | 1,35 | 2,03 | 2,71 | 4,06 |
| 75 | ✓ | - | 28 % | 8,8 | 20 | 1,26 | 1,89 | 2,52 | 3,78 |
| 100 | ✓ | - | 30 % | 8,9 | 15 | 1,80 | 2,70 | 3,60 | 5,40 |
| 167 | ✓ | ✓ | 23 % | 7 | 9 | 2,30 | 3,46 | 4,61 | 6,91 |
ENERGIESPAR MOTOR ROSYNC MIT SCHNECKENGETRIEBE S
| Übersetzung | Typ S | Wirkungsgrad | Max. Drehmoment | Drehzahl | Drehmoment der Motortypen | ||||
|---|---|---|---|---|---|---|---|---|---|
| i | Vollwelle | Hohlwelle | η % | Nm | 1/min | 36 | 46 | 86 | 66 |
| Nm | Nm | Nm | Nm | ||||||
| Schneckengetriebe-Motor (4polig) | |||||||||
| 2,5 | ✓ | - | 83 % | 5,3 | 600 | 0,27 | 0,48 | 0,66 | 1,12 |
| 5 | ✓ | - | 79 % | 11,0 | 300 | 0,51 | 0,91 | 1,26 | 2,13 |
| 7 | ✓ | ✓ | 75 % | 12,0 | 214 | 0,68 | 1,21 | 1,68 | 2,84 |
| 10 | ✓ | - | 70 % | 11,0 | 150 | 0,91 | 1,61 | 2,24 | 3,78 |
| 15 | ✓ | ✓ | 66 % | 13,0 | 100 | 1,29 | 2,28 | 3,17 | 5,35 |
| 20 | ✓ | ✓ | 61 % | 12,0 | 75 | 1,59 | 2,81 | 3,90 | 6,59 |
| 30 | ✓ | ✓ | 49 % | 12,0 | 50 | 1,91 | 3,38 | 4,70 | 7,94 |
| 50 | ✓ | - | 37 % | 11,0 | 30 | 2,41 | 4,26 | 5,29 | 9,99 |
| 55 | - | ✓ | 41 % | 13,0 | 27 | 2,93 | 5,19 | 7,22 | 12,18 |
| 75 | ✓ | - | 28 % | 8,8 | 20 | 2,73 | 4,83 | 6,72 | - |
| 100 | ✓ | - | 30 % | 8,9 | 15 | 3,90 | 6,90 | 9,60 | - |
| 167 | ✓ | ✓ | 23 % | 7 | 9 | 4,99 | - | 8,83 | - |
LOW-NOISE MOTOREN ROSLYDE MIT SCHNECKENGETRIEBE S
| Übersetzung | Typ S | Wirkungsgrad | Max. Drehmoment | Drehzahl | Drehmoment der Motortypen | ||||
|---|---|---|---|---|---|---|---|---|---|
| i | Vollwelle | Hohlwelle | η % | Nm | 1/min | 36 | 46 | 86 | 66 |
| Nm | Nm | Nm | Nm | ||||||
| Schneckengetriebe-Motor (4polig) | |||||||||
| 2,5 | ✓ | - | 83 % | 5,3 | 600 | 0,15 | 0,29 | 0,27 | 0,54 |
| 5 | ✓ | - | 79 % | 11,0 | 300 | 0,28 | 0,55 | 0,51 | 1,03 |
| 7 | ✓ | ✓ | 75 % | 12,0 | 214 | 0,37 | 0,74 | 0,68 | 1,37 |
| 10 | ✓ | - | 70 % | 11,0 | 150 | 0,49 | 0,98 | 0,91 | 1,82 |
| 15 | ✓ | ✓ | 66 % | 13,0 | 100 | 0,69 | 1,39 | 1,29 | 2,57 |
| 20 | ✓ | ✓ | 61 % | 12,0 | 75 | 0,85 | 1,71 | 1,59 | 3,17 |
| 30 | ✓ | ✓ | 49 % | 12,0 | 50 | 1,03 | 2,06 | 1,91 | 3,82 |
| 50 | ✓ | - | 37 % | 11,0 | 30 | 1,30 | 2,59 | 2,41 | 4,81 |
| 55 | - | ✓ | 41 % | 13,0 | 27 | 1,58 | 3,16 | 2,93 | 5,86 |
| 75 | ✓ | - | 28 % | 8,8 | 20 | 1,47 | 2,94 | 2,73 | 5,46 |
| 100 | ✓ | - | 30 % | 8,9 | 15 | 2,10 | 4,20 | 3,90 | 7,80 |
| 167 | ✓ | ✓ | 23 % | 7 | 9 | 2,66 | 4,99 | 5,37 | 9,99 |
BLDC MOTOREN ROMOTION MIT SCHNECKENGETRIEBE S
| Übersetzung | Bauform | Wirkungsgrad | Zulässiges Drehmoment | Nenndrehzahl/Nennmoment | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| i | Vollwelle | Hohlwelle | η % | Nm | ROMOTION 44.2 | ROMOTION 84.2 | ROMOTION 84.4 | |||
| 1/min | Nm | 1/min | Nm | 1/min | Nm | |||||
| Schneckengetriebe-Motor | ||||||||||
| 2,5 | ✓ | - | 83 % | 5,3 | 1240 | 0,5 | 1240 | 0,7 | 1280 | 0,8 |
| 5 | ✓ | - | 79 % | 11 | 620 | 1,0 | 620 | 1,3 | 640 | 1,5 |
| 7 | ✓ | ✓ | 75 % | 12 | 443 | 1,3 | 443 | 1,8 | 457 | 2,1 |
| 10 | ✓ | - | 70 % | 11 | 310 | 1,8 | 310 | 2,4 | 320 | 2,7 |
| 15 | ✓ | ✓ | 66 % | 13 | 207 | 2,5 | 207 | 3,4 | 213 | 3,9 |
| 20 | ✓ | ✓ | 61 % | 12 | 155 | 3,1 | 155 | 4,2 | 160 | 4,8 |
| 30 | ✓ | ✓ | 49 % | 12 | 103 | 3,7 | 103 | 5,0 | 107 | 5,7 |
| 50 | ✓ | - | 37 % | 11 | 62,0 | 4,6 | 62,0 | 6,3 | 64,0 | 7,2 |
| 55 | - | ✓ | 41 % | 13 | 56,4 | 5,6 | 56,4 | 7,7 | 58,2 | 8,8 |
| 75 | ✓ | - | 28 % | 8,8 | 41,3 | 5,3 | 41,3 | 7,1 | 42,7 | 8,2 |
| 100 | ✓ | - | 30 % | 8,9 | 31,0 | 7,5 | 31,0 | 10,2 | 32,0 | 11,7 |
| 167 | ✓ | ✓ | 23 % | 7 | 18,6 | 9,6 | - | - | - | - |
SCHNECKENGETRIEBE S




Fachbeiträge
Erstaunlich effizient
Je teurer Energie wird, desto wichtiger ist der sparsame Umgang damit.
Mehr Getriebeauswahl
Schneckengetriebe von Ruhrgetriebe erweitern den Rotek Baukasten.